第0章 制御理論のいろいろ
0.1 制御理論の分類――「古典制御」「現代制御」「ポスト現代制御」
第1章 「Scilab」と「Xcos」
1.1 「Scilab」について
1.2 「Xcos」について
1.3 「Scilab」のインストール
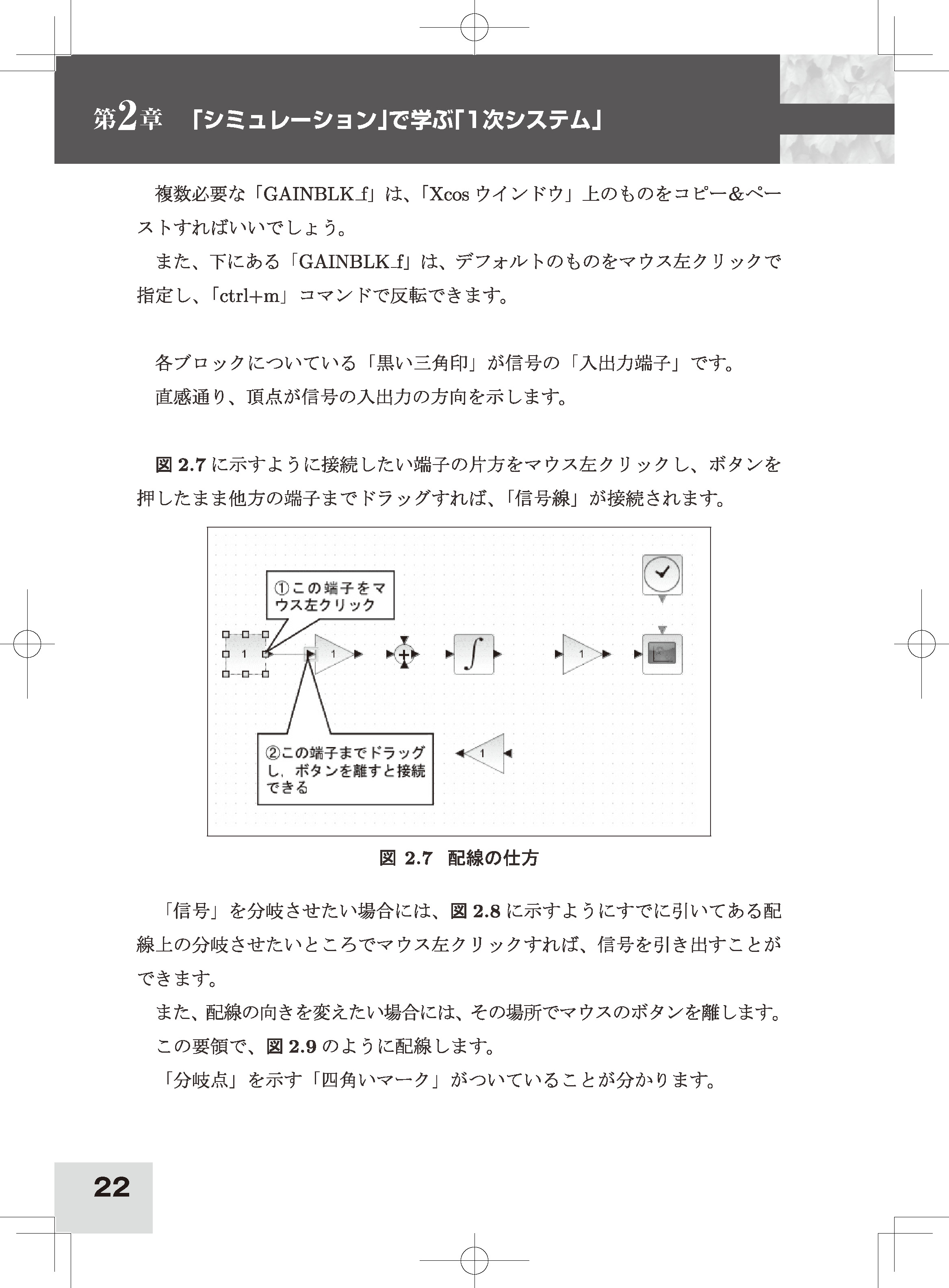
第2章 「シミュレーション」で学ぶ「1 次システム」
2.1 制御工学とシステム
2.2 1次システム
2.3 「1 次システム」を使って「Xcos」の操作法を覚える
2.4 シミュレーション結果について考える
2.5 「シミュレーション結果」と「方程式」の関係
2.6 操作法の続き
2.7 「1 次システム」における「状態フィードバック制御」
第3章 「2 次システム」を理解するための、計算技術
3.1 「行列」と「ベクトル」
3.2 「行列」の「加減算」と「乗算」
3.3 逆行列
3.4 「1 次独立」と「1 次従属」
3.5 「固有値」と「固有ベクトル」
3.6 「ケーリー=ハミルトン」の定理
3.7 マクローリン展開
3.8 ラプラス変換
第4章 「現代制御理論」のあらまし
4.1 システム方程式
4.2 「システム方程式」の
4.3 「システム方程式」と「伝達関数」の関係
4.4 「2 次システム」の「状態方程式」の「解」(「eAt」の話)
4.5 手計算による「2 次システム」の「過渡応答」
4.6 「2 次システム」における、「安定性」
4.7 「2 次システム」における「状態フィードバック制御」
4.8 「可制御性」と「可観測性」
4.9 「可制御性行列」の意味
4.10 「2 次システム」における「オブザーバ」
4.11 「手計算」による「制御系」の「設計演習」
第5章 「Scilab」による「制御系設計」≪演習≫
5.1 「2次システム」の問題を「Scilab」を使って解く
第6章 「1 次システム」におけるサーボ系
6.1 1型のサーボ系
6.2 2型のサーボ系
第7章 「2 次システム」のシミュレーション
7.1 「2 次システム」における「状態フィードバック制御」
7.2 オブザーバ
|