|
はじめに
[1.1] 正弦波の表現
1.1.1 直角座標による表示
1.1.2 極座標による表示
1.1.3 指数関数による表示
1.1.4 複素数の四則演算
[1.2] ラプラス変換
1.2.1 ラプラス変換の定義
1.2.2 線形微分方程式とラプラス変換
1.2.3 代表的なラプラス変換
1.2.4 ラプラス変換の導出
[1.3] ラプラス逆変換
1.3.1 ラプラス変換の使用方法
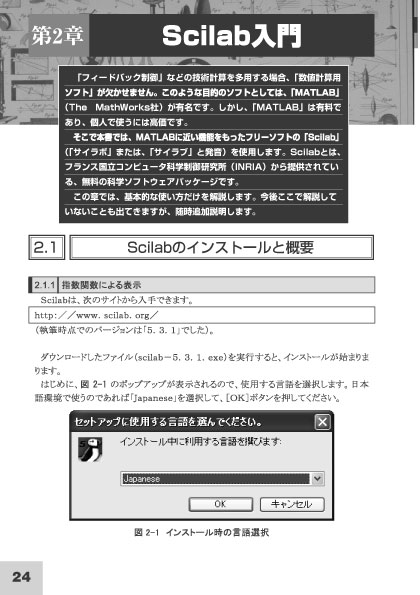
[2.1] Scilabのインストールと概要
2.1.1 指数関数による表示
2.1.2 簡単な実行例
2.1.3 メニューの解説
[2.2] 四則演算
2.2.1 四則演算の実行
2.2.2 数値の指数表現
2.2.3 数値表示のフォーマット指定
2.2.4 く使う関数と定数
[2.3] 配列
2.3.1 配列を使う
2.3.2 コロン演算子と連結
2.3.3 配列の演算
2.3.4 linespace、logspace
[2.4] グラフ表示
2.4.1 「sinグラフ」の表示
2.4.2 グラフ表示関数の解説
2.4.3 線種指定のグラフ
2.4.4 その他のグラフ表示関連関数
[2.5] Scilabプログラム入門
2.5.1 テキストエディタ「SciNotes」
2.5.2 プログラムの保存
2.5.3 プログラムの実行
2.5.4 input関数
2.5.5 halt/pause
2.5.6 if(判定)文
2.5.7 for(繰り返し)文
2.5.8 while(繰り返し)文
[3.1] 「伝達関数」の概要
3.1.1 運動方程式を使った例
3.1.2 入力関数
3.1.3 解析
3.1.4 グラフ表示
[3.2] poly、syslin、csim
3.2.1 「伝達関数」からのグラフ表示
3.2.2 poly関数
3.2.3 syslin関数、csim関数
[3.3] ステップ応答法
3.3.1 比例要素
3.3.2 微分要素
3.3.3 積分要素
3.3.4 1次遅れ要素
[3.4] RLC回路
3.4.1 RLC回路
3.4.2 伝達関数の導出
[4.1] ゲインと位相
4.1.1 出力信号を求める
[4.2] ボード線図
4.2.1 ゲインと位相の算出
4.2.2 ボード線図の描画
[4.3] 比例・微分・積分
4.3.1 比例要素
4.3.2 微分要素
4.3.3 積分要素
[4.4] 1次遅れ、無駄時間
4.4.1 1次遅れ要素
4.4.2 無駄時間要素
4.4.3 パデ近似
4.4.4 パデ近似の導出
[4.5] pade関数の作成
4.5.1 pade関数の仕様
4.5.2 pade関数のプログラム
[5.1] ブロック線図
5.1.1 ブロック線図の基本
5.1.2 直列接続
5.1.3 並列接続
5.1.4 フィードバック接続
5.1.5 ブロック図の簡単化
[5.2] フィードバック
5.2.1 安定性評価[解法(1)]
5.2.2 安定性評価[解法(2)]
5.2.3 Scilabでの確認
[5.3] 2次遅れ要素
5.3.1 「1次遅れ要素」の「直列接続」
5.3.2 振動系
5.3.3 「振動系」の「特性根」
5.3.4 「振動系」の「ステップ応答」
5.3.5 「振動系」の「周波数応答」
[5.4] 「振動系」の「ボード線図」
[5.5] ナイキスト線図
5.5.1 一巡伝達関数
5.5.2 「伝達関数」の「極座標表現」
5.5.3 nyquist関数
[5.6] 安定性の判別
5.6.1 判別方法(1)
5.6.2 判別方法(2)
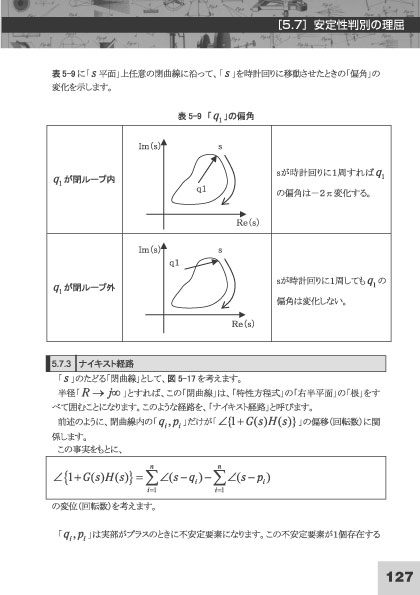
[5.7] 安定性判別の理屈
5.7.1 特性根
5.7.2 「1+G(s)+H(s)」の回転角
5.7.3 ナイキスト経路
5.7.4 結論
[5.8] 安定余裕の評価
5.8.1 「ナイキスト線図」から「安定余裕」の評価
5.8.2 「ボード線図」から「安定余裕」の評価
5.8.3 「無駄時間要素」を含んだときの「安定性」の評価
[5.9] 評価の例題
5.9.1 「無駄時間要素」を含んだときの「安定性」の評価
5.9.2 「ボード線図」からの「安定性」の評価
5.9.3 Scilabの関数を使う
[6.1] Xcos入門
6.1.1 「ブロック線図」の基本
6.1.2 「ブロック線図」の作図
6.1.3 シミュレーション
6.1.4 シミュレーションの実行
[6.2] [例]運動方程式
6.2.1 「数学モデル」の作成
6.2.2 「ブロック線図」の作成
[7.1] PID制御概要
7.1.1 「ON/OFF制御」の場合
7.1.2 「PID制御」入門
7.1.3 「PID制御」基本式のラプラス変換
[7.2] 比例(P)制御
7.2.1 「P制御」の特徴
7.2.2 「P制御」のシミュレーション
7.2.3 「P制御」をXcosでシミュレーション
[7.3] 積分(I)制御
7.3.1 「I制御」の特徴
7.3.2 PI(比例+積分)動作
7.3.3 「PI制御」の例
7.3.4 「PI制御」をScicosでシミュレーション
[7.4] 微分(D)制御
7.4.1 「D制御」の特徴
7.4.2 PID(比例+積分+微分)制御
7.4.3 「PID制御」の例
7.4.4 「PI制御」をScicosでシミュレーション
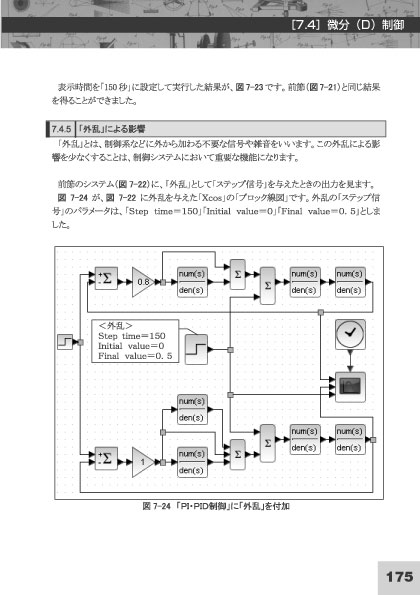
7.4.5 「外乱」による影響
[7.5] PIDボード線図
7.5.1 「PI制御」のボード線図
7.5.2 「PID制御」のボード線図
7.5.3 「PI・PID制御」の「ステップ応答」
[8.1] DCモーターの特性
8.1.1 「DCモーター」の動作原理
8.1.2 逆起電力
8.1.3 「DCモーター」の電気モデル
8.1.4 「DCモーター」の機械モデル
8.1.5 機械モデルの伝達関数
8.1.6 ブロック線図
8.1.7 「ブロック線図」の簡略化
[8.2] 実例
8.2.1 制御対象の「仮想DCモーター」の特性
8.2.2 DCモーターのステップ応答
8.2.3 PID制御シミュレーション
索引
※ 内容が一部異なる場合があります。発売日は、東京の発売日であり、地域によっては1〜2日程度遅れることがあります。あらかじめご了承ください。
|